Điều khiển giám sát hệ cầu cân bằng với thanh và bóng dùng mạng Nơ-ron hàm cơ sở xuyên tâm
Vì tính phi tuyến, bất ổn và có trễ truyền dữ liệu, hệ cầu cân bằng với thanh và bóng khá khó kiểm soát. Nghiên cứu này đề xuất kết hợp điều khiển vi-tích phân-tỷ lệ (PID) và điều khiển giám sát dùng mạng nơ-ron hàm cơ sở xuyên tâm (RBF), gọi là điều khiển RBF-PID, trên mô hình thật của hệ cầu cân bằng.
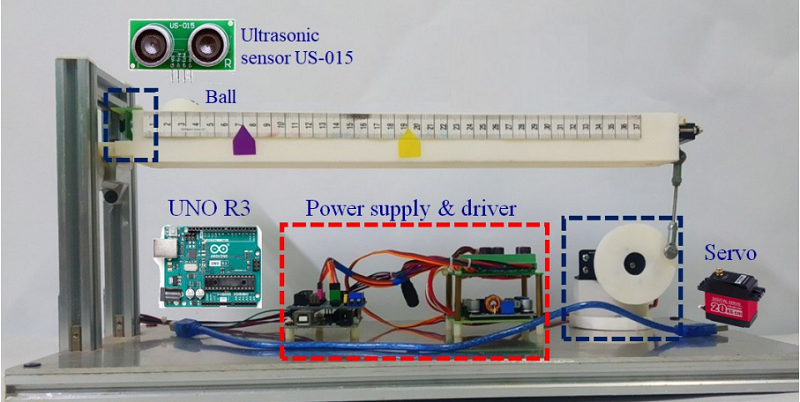
Mô hình này đã được chế tạo từ trước, có tích hợp bộ bù sai số và thời gian trễ. Bộ điều khiển PID đóng vai trò đưa đáp ứng về gần giá trị tham khảo. Nhiệm vụ tinh chỉnh đáp ứng sẽ do bộ RBF đảm trách. Kết quả thực nghiệm trên hệ cầu cân bằng với cơ chế định vị bằng sóng siêu âm cho kết quả tốt hơn các nghiên cứu trước đó. Cụ thể, thời gian tăng của đáp ứng đạt 1,5 ± 0,3 giây; thời gian xác lập đạt 6,5 ± 1,0 giây; tuy độ vọt lố còn khá lớn, khoảng 11 ± 2 %, nhưng sai số xác lập đã được triệt tiêu. Kết quả cho thấy bộ điều khiển RBF-PID thích hợp để kiểm soát hệ thống.
Hệ cầu cân bằng với thanh và bóng (beam and ball system) là một hệ hở, có tính phi tuyến và bất ổn (Salem, 2013; Ahmad & Hussain, 2017), thường được dùng để kiểm nghiệm các giải thuật điều khiển. Bộ điều khiển có nhiệm vụ kiểm soát góc nghiêng của thanh trượt để giữ quả bóng cân bằng tại vị trí mong muốn. Tuy nhiên, dưới tác động của trọng lực, với một góc nghiêng nhỏ của thanh trượt, quả bóng sẽ lăn nhanh nên rất khó giữ đúng tại vị trí cân bằng. Vì vậy, đây có thể là một điểm đặc trưng đã hấp dẫn nhiều nghiên cứu liên quan đến hệ cầu cân bằng.
Meenakshipriya and Kalpana (2014) và Maalini et al. (2016) đã tập trung xây dựng mô hình hóa hệ cầu cân bằng và áp dụng bộ điều khiển kinh điển PID (Proportional – Integral – Derivative controller) để mô phỏng hoạt động của nó. Tuy nhiên, với tham số cố định, bộ điều khiển PID không đủ linh hoạt để thích ứng với các điều kiện biến đổi của mô hình đối tượng. Chính vì thế, nhiều nghiên cứu đã xây dựng các giải thuật điều khiển hiện đại, thông minh để có khả năng thích ứng tốt hơn. Thật vậy, Kharola and Patil (2017) đã áp dụng thành công giải thuật điều khiển dùng mạng nơ-ron mờ trên mô hình toán của hệ này. Tứ và ctv. (2017) đã áp dụng mạng nơ-ron hàm cơ sở xuyên tâm RBF (radial basis function neural network) để mô phỏng hệ điều khiển này. Tương tự, Latif et al. (2019) đã kết hợp bộ điều khiển PID và bộ điều khiển mờ và Azar et al. (2020) đã áp dụng giải thuật bầy đàn để tìm kiếm tham số tối ưu cho bộ điều khiển PID và kiểm chứng trên mô hình hệ cầu cân bằng thông qua mô phỏng. Thực tế cho thấy, giữa mô phỏng trên máy tính và điều khiển thiết bị thật luôn tồn tại một khoảng cách mà ở đó, việc tuyến tính hóa mô hình toán của đối tượng không thể phản ảnh đầy đủ các tác động thực tiễn của môi trường. Vì vậy, một số nghiên cứu đã tiến hành xây dựng mô hình thật của hệ cầu cân bằng. Một yêu cầu kỹ thuật khó khăn trong triển khai mô hình thật của hệ này, đó là giải pháp đo đạc chính xác vị trí quả bóng trên thanh trượt. Ngoài ra, thời gian trễ trong truyền thông tín hiệu từ cảm biến định vị về đến bộ điều khiển cũng ảnh hưởng lớn đến việc kiểm soát hệ thống. Bởi vì, nếu bộ điều khiển xác định quả bóng ở vị trí này, nhưng thực tế trên mô hình, quả bóng đã dịch chuyển sang vị trí khác thì tín hiệu điều khiển luôn bị tính toán sai.
Trong các nghiên cứu hiện nay, có hai trường phái thiết kế mô hình thực của hệ cầu cân bằng với kỹ thuật định vị quả bóng bằng phương pháp tiếp xúc và không tiếp xúc. Đối với phương pháp tiếp xúc, các nhóm nghiên cứu đã dùng hòn bi sắt trượt trên 2 thanh kim loại, như trong công bố của (Keshmiri, 2012; Saad & Khalallah, 2017). Vị trí của hòn bi chính là điểm ngắn mạch hai thanh trượt kim loại. Phương pháp này tỏ ra thuận lợi trong thiết kế, nhưng nó tồn tại một hạn chế lớn, đó là sai số vị trí sẽ tăng theo thời gian, do hòn bi và các thanh trượt sẽ bị mài mòn, bị oxy hóa và bám bụi bẩn. Để khắc phục hạn chế này, nhiều nhóm nghiên cứu đã sử dụng phương pháp định vị không tiếp xúc. Trong các nghiên cứu của Ali et al. (2017) và Ahmad et al. (2017), các tác giả đã sử dụng cảm biến siêu âm để đo vị trí quả bóng. Tuy nhiên, các nghiên cứu này chưa quan tâm đến việc xử lý sai số cảm biến và thời gian trễ của tín hiệu. Hơn nữa, điểm hạn chế lớn của các nghiên cứu này là các tác giả lại sử dụng bộ điều khiển PID truyền thống cho mô hình thực nghiệm của mình.
Nghiên cứu này nhằm mục tiêu áp dụng kỹ thuật điều khiển kết hợp giữa giải thuật điều khiển PID và giải thuật điều khiển giám sát (supervisory control) dùng mạng nơ-ron RBF (Liu, 2013), gọi tắt là bộ điều khiển RBF-PID, trên mô hình thực của hệ cầu cân bằng. Trong phạm vi bài báo này, giải thuật điều khiển và kết quả thực nghiệm sẽ được tập trung trình bày chi tiết. Phương pháp thiết kế và chế tạo mô hình thực nghiệm có tích hợp bộ bù sai số cảm biến và thời gian trễ của hệ thống được trình bày trong một công bố khác của nhóm nghiên cứu.
nqhuy
Tạp chí Khoa học Trường Đại học Cần Thơ Tập 58, Số 3A (2022): 26-35