Khảo sát ảnh hưởng của các tham số bộ điều khiển FUZZY PD + I trên cơ không đồng bộ ba pha
Bộ điều khiển vi phân tỷ lệ mờ cộng tích phân điều khiển mô hình động cơ không đồng bộ ba pha được xây dựng trong bài viết. Động cơ không đồng bộ ba pha được mô phỏng trên MATLAB®/Simulink dựa theo phương trình trạng thái trên hệ tọa độ từ thông rotor (hệ tọa độ dq).
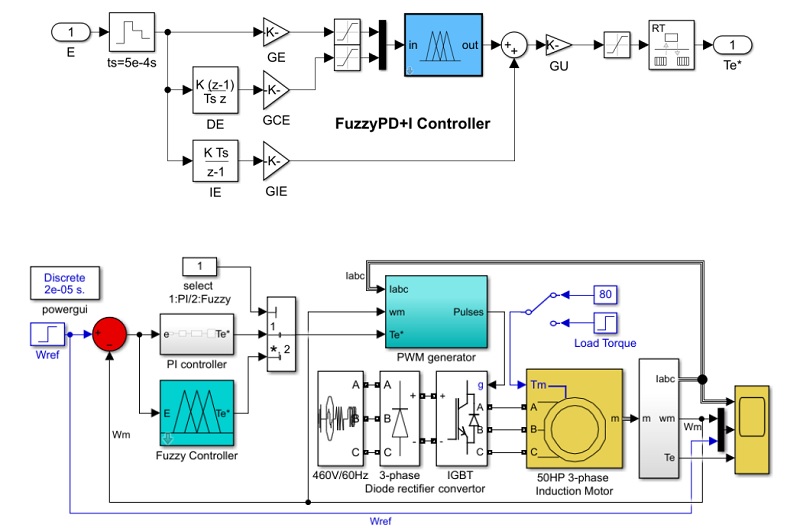
Mô phỏng với tải khác nhau và có nhiễu tác động vào hệ thống cũng như so sánh với PI và khảo sát ảnh hưởng của các tham số của bộ điều khiển vi phân tỷ lệ mờ cộng tích phân. Kết quả mô phỏng cho thấy giải pháp đề xuất đã đáp ứng tốt hơn so với bộ điều khiển PI thông thường, thời gian xác lập của hệ thống hợp lý, độ vọt lố bị triệt tiêu và sai số ngõ ra thấp. Ngoài ra, bộ điều khiển còn ổn định với nhiễu tác động vào hệ thống.
Ngày nay, hầu hết các hoạt động sản xuất công nghiệp đều sử dụng hệ truyền động điện, trong đó, động cơ điện là nguồn động năng chủ đạo (Aspalli et al., 2012). Trong đó, với thiết kế đơn giản, chi phí bảo trì thấp và vận hành dễ dàng, động cơ cảm ứng (induction motor) hay động cơ không đồng bộ (KĐB) chiếm hơn 80% nguồn chuyển đổi cơ – điện trong công nghiệp (Aziri et al., 2017). Thống kê 2011 cho thấy có hơn 16 tỷ động cơ điện đang hoạt động trên thế giới, với tốc độ tăng trưởng khoảng 50% trong 5 năm (Aspalli et al., 2012; Henao, 2014).
Việc kiểm soát tốc độ động cơ KĐB 3 pha luôn là chủ đề được nhiều nhà khoa học và các hãng thiết bị quan tâm (Kanti, 2015; Lepka & Stekl, 2005). Tuy nghiên, bản chất động cơ KĐB 3 pha là phi tuyến và bị tác động bởi nhiều yếu tố trong quá trình vận hành như sự thay đổi của tải, sự tác động của môi trường công nghiệp… các kiểu điều khiển dù đơn giản, dễ bảo dưỡng nhưng lại không đáp ứng thật sự tốt (Hartono et al., 2019). Ngoài ra, tham số của đối tượng khi bị thay đổi sẽ ảnh hưởng đến chất lượng điều khiển, đối với các giải pháp thiết kế đòi hỏi mô hình toán của đối tượng như kiểu điều khiển PID (Proportional Integral Derivative controller) truyền thống (Idoko et al., 2017; Hartono et al., 2019). Việc không xác định chính xác mô hình toán của động cơ sẽ dẫn đến bộ điều khiển chỉ được chỉnh định gần đúng, làm cho khả năng vọt lố tốc độ (quá tốc) lên đến 30% (Hartono et al., 2019). Điều này ảnh hưởng đến hệ truyền động và tuổi thọ của động cơ do quá tốc lớn ở giai đoạn khởi động (Basu & Yusuf, 1999).
Vì vậy, điều khiển động cơ KĐB 3 pha hiện có hai hướng nghiên cứu được triển khai. Hướng thứ nhất cố gắng mô hình hóa động cơ KĐB 3 pha càng chính xác càng tốt (Lepka & Stekl, 2005; Zeb et al., 2017; Tuấn và ctv., 2018) để hỗ trợ cho khâu mô phỏng và hiệu chỉnh bộ điều khiển, nhất là điều khiển PID (Idoko et al., 2017; Hartono et al., 2019) vốn dễ triển khai ở quy mô công nghiệp. Hướng thứ hai không đặt nặng vấn đề độ chính xác của mô hình toán, mà phát triển các giải thuật điều khiển chỉ dựa trên tín hiệu vào, ra như dùng mạng nơ-ron nhân tạo (Lftisi et al., 2016). Tuy nhiên, các hướng nghiên cứu này vẫn tồn tại một số hạn chế nhất định. Thật vậy, do điều kiện công nghiệp khắc nghiệt, các đặc tính kỹ thuật của động cơ sẽ thay đổi, trong khi đó bộ điều khiển PID cố định hay bộ điều khiển dùng mạng nơ-ron với cơ chế huấn luyện off-line trên đều không thể tự chỉnh định lại, dẫn đến kết quả điều khiển bị ảnh hưởng.
Trong số các kỹ thuật điều khiển thông minh, logic mờ là một phương pháp thể hiện khả năng suy diễn của bộ óc con người và nó đã được ứng dụng thành công trong nhiều lĩnh vực (Meng & Ya, 2001). Cơ chế suy diễn mờ được xem là một phương pháp đơn giản và hữu hiệu để tinh chỉnh các bộ điều khiển kinh điển (Kanagaraj et al., 2008). Điều khiển mờ được biết đến rộng rãi về khả năng kiểm soát hệ thống phi tuyến có cấu trúc phức tạp mà không cần biết mô hình chính xác của đối tượng. Tuy nhiên, kỹ thuật điều khiển mờ lại tồn tại nhược điểm về việc khó triệt tiêu sai số xác lập (Ngôn, 2011; Ngôn & Nghiệm, 2020). Do đó, việc cải thiện bộ điều khiển mờ bằng cách tăng cường một khâu tích phân là một giải pháp khả thi để loại trừ sai số xác lập (Bong & Chung, 2002; Ngôn, 2011; Singh et al., 2020; Ahmed et al., 2022).
Trên cơ sở đó, giải pháp tận dụng ưu thế của điều khiển Fuzzy PD + I để kiểm soát tốc độ động cơ KĐB ba pha, mà ở đó mô hình toán của đối tượng chỉ được sử dụng để mô phỏng kiểm chứng giải thuật, không có vai trò thiết yếu trong khâu thiết kế được đề xuất trong nghiên cứu này.
nqhuy
Tạp chí Khoa học Trường Đại học Cần Thơ, Tập 58, Số 5A (2022): 52-59