Ứng dụng phương pháp tối ưu hóa hình học để tái thiết kế cánh tay trên của Robot Delta
Nghiên cứu được thực hiện bởi nhóm tác giả Trần Thanh Hải Tuấn, Võ Như Thành, Lê Hoài Nam, Nguyễn Đình Sơn thuộc Trường Đại học Bách khoa – Đại học Đà Nẵng. Nghiên cứu được đăng trên tạp chí Khoa học và Công nghệ Đại học Đà Nẵng, Tập 18, số 3(2020): (59-62).
Ngày nay, Robot Delta đang được áp dụng rộng rãi trong nhiều lĩnh vực y học, quân sự, mô phỏng, sản xuất công nghiệp và được biết đến là robot gắp - thả có tốc độ rất nhanh. Đây là loại robot song song được phát minh bởi Reymond Clavel [1] với nhiều ưu điểm vượt trội so với các loại robot dạng chuỗi truyền thống như: Độ cứng vững lớn, khả năng chịu tải cao…
Phương pháp tối ưu hóa hình học là phương pháp toán học để tối ưu hóa vật liệu trong không gian thiết kế với tải trọng cho trước, điều kiện biên và ràng buộc. Ưu điểm của phương pháp này là chúng ta có thể thiết kế bất kỳ hình dạng nào trong không gian thiết kế, thay vì xử lý các cấu hình được xác định trước. Với việc sử dụng phương pháp tối ưu hóa hình học, chúng ta có thể tạo ra được các chi tiết có khối lượng nhẹ hơn do đã cắt giảm được lượng vật liệu sử dụng. Nhờ đó, có thể tiết kiệm được chi phí về vật liệu trong quá trình chế tạo. Hơn nữa, việc sử dụng ít vật liệu hơn sẽ góp phần giảm thiểu ô nhiễm môi trường do lượng cacbon tiêu thụ giảm trong bối cảnh đất nước hướng tới một nền sản xuất xanh.
Đã có nhiều nghiên cứu về phương pháp tối ưu hoá hình học cũng như ứng dụng phương pháp này cho các bài toán thực tế, như thiết kế lại hình dáng của các chi tiết trong ngành hàng không hoặc các chi tiết kỹ thuật hàng ngày như chiếc cờ-lê. Đối với thiết kế robot, phương pháp tối ưu hóa hình học đã được sử dụng trong thiết kế các robot có hình dáng con người. Tuy nhiên, hiện nay chưa có nhiều nghiên cứu sử dụng phương pháp tối ưu hóa hình học trên robot Delta.
Với mong muốn tạo ra một mô hình robot Delta mới phục vụ trong giảng dạy và nghiên cứu cùng các ưu điểm nổi bật của phương pháp tối ưu hóa hình học trong thiết kế, bài báo này trình bày quá trình ứng dụng phương pháp tối ưu hoá hình học để tái thiết kế một phần cánh tay robot Delta hiện đang được phát triển tại Khoa Cơ khí – Trường Đại học Bách khoa – Đại học Đà Nẵng.
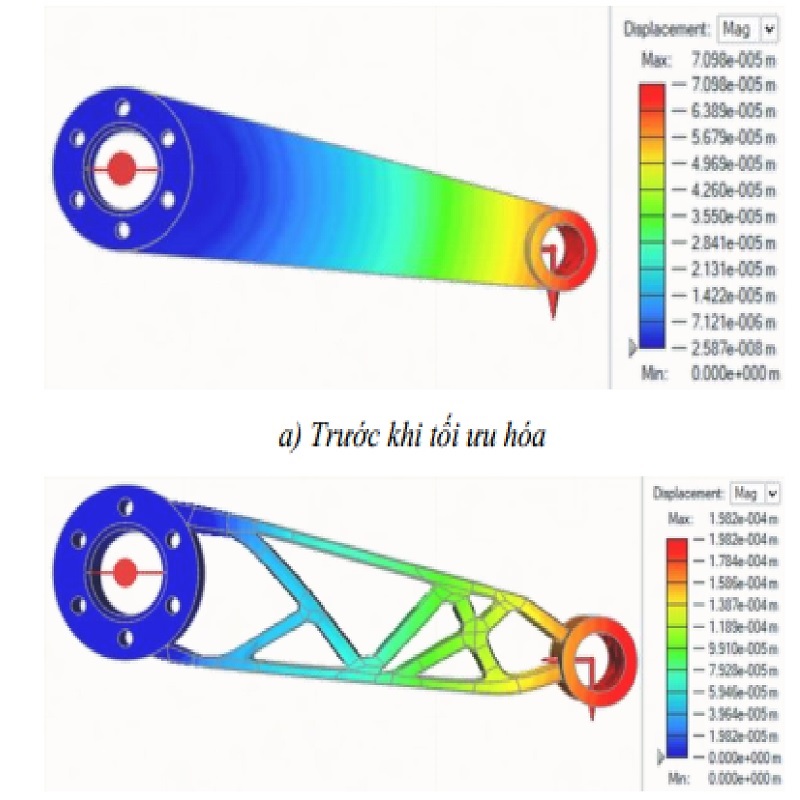
Qua quá trình nghiên cứu, có thể kết luận quá trình ứng dụng phương pháp thiết kế sử dụng tối ưu hóa hình học để giúp người thiết kế có thể cải tiến sản phẩm trong quá trình thiết kế. Phương pháp cho phép tối ưu sự phân bố vật liệu và giảm khối lượng vật liệu sử dụng nhưng vẫn đảm bảo các đặc tính cơ học của chi tiết.
Một nghiên cứu điển hình là cánh tay trên của robot Delta đã được trình bày trong bài báo để minh họa cho cho phương pháp. Chi tiết mới đã được loại bỏ những phần vật liệu không cần thiết nhưng vẫn đảm bảo các ràng buộc thiết kế.
Tóm lại, phương pháp thiết kế với việc tích hợp tối ưu hóa hình học đang trở thành hướng tiếp cận cho các công nghệ gia công tiên tiến như công nghệ gia công đắp lớp. Nó có thể góp phần tạo ra một thế hệ robot Delta mới có khối lượng nhẹ hơn vì giảm được quán tính của robot trong quá trình di chuyển. Từ đó, giúp robot hoạt động ổn định và chính xác hơn.
Tạp chí Khoa học và Công nghệ Đại học Đà Nẵng, Tập 18, số 3(2020): (59-62).