Phân tích động học và các cấu hình kỳ dị của tay máy robot song song phẳng 3 bậc tự do
Nghiên cứu được thực hiện bởi nhóm tác giả Dương Tấn Quốc, Lê Tiến Dũng thuộc Trường Đại học Bách khoa – Đại học Đà Nẵng và Đại học Duy Tân. Nghiên cứu được đăng trên tạp chí Khoa học và Công nghệ Đại học Đà Nẵng, Tập 1, số 5(2017): (76-80).
Trong thực tế có nhiều loại kiến trúc tay máy khác nhau đã được nghiên cứu sử dụng rộng rãi trong công nghiệp. Tay máy robot song song cho hiệu năng cao hơn về độ chính xác, độ bền và khả năng tải lớn khi so với tay máy nối tiếp. Nó đã được ứng dụng trong rất nhiều ứng dụng từ sản xuất hàng hóa, gia công cơ khí đến mô phỏng máy bay, và trở nên phổ biến hơn trong công nghiệp công cụ cơ khí hóa trên thế giới . Để điều khiển tay máy robot, người ta thường dùng lý thuyết điều khiển robot song song của các tác giả Lei Liu, Quanmin Zhu, Lei Cheng, Yongji Wang, Dongya Zhao. Mô hình tay máy tổng quát đã được Yang, Guilin, Weihai Chen, I. Chen đưa ra. Mô hình tay máy robot song song phẳng 3-RRR dựa theo phương pháp DH (Denavit & Hartenberg, 1955) đã được Serdar Küçük đưa ra . Trong sách các tác giả Lei Liu, Quanmin Zhu, Lei Cheng, Yongji Wang, Dongya Zhao đã nêu ra việc ứng dụng các kỹ thuật điều khiển như điều khiển đồng bộ, điều khiển trượt, điều khiển thích nghi một cách tổng quát cho nhiều đối tượng robot khác nhau. Đối với việc nghiên cứu các cấu hình kỳ dị thì đã được nêu một cách tổng quát cho các loại robot song song của tác giả Merlet J.P.
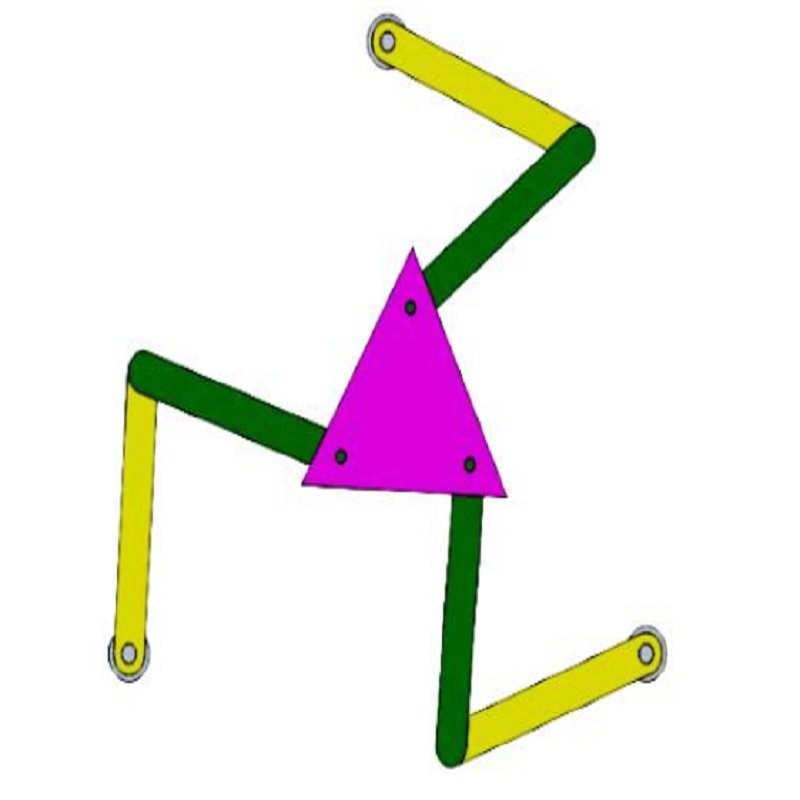
Merlet J.P, đã trình bày các cách tìm ra cấu hình kỳ dị tổng quát cho các loại tay máy robot song song. Cấu hình kỳ dị xảy ra khi các góc chủ động và vị trí, góc xoay của khâu chấp hành cuối theo một mối quan hệ vô nghiệm, hay nói cách khác, xét về Toán học sẽ không tồn tại giá trị biến trong phương trình giữa góc chủ động và tọa độ, góc xoay của khâu chấp hành cuối. Xét về phương diện Vật lý của mô hình thực tế, thì đó là khi các thanh của tay máy robot bị căng ra hoặc gấp lại. Nếu tay máy robot bị rơi vào trường hợp đó thì chắc chắn một điều là việc điều khiển sẽ khó khăn và không bám tốt quỹ đạo đặt ra, hay thậm chí không thể điều khiển được. Chính vì vậy, việc tìm ra một không gian làm việc loại trừ các cấu hình kỳ dị được coi là việc tất yếu trong thiết kế điều khiển tay máy robot nói chung và tay máy robot song song phẳng nói riêng. Trong bài báo này sẽ lần lượt trình bày các mô hình động học được mô tả theo dạng hình học, nó khác với phương pháp DH như trong bài báo của Serdar Küçük. Từ đó các ma trận Jacobian cũng được xây dựng nhằm biểu diễn mối quan hệ giữa vận tốc góc của robot trong hệ tọa độ khớp chủ động và tọa độ trong hệ tọa độ Descartes, góc xoay khâu chấp hành cuối. Dựa trên các ma trận Jacobian đó, bài báo sẽ đi vào phân tích các loại cấu hình kỳ dị của tay máy robot. Sau đó, để kiểm tra các kết quả đạt được, bài báo thực hiện mô phỏng trên Matlab/Simulink và SimMechanics trích xuất từ SolidWorks.
Tạp chí Khoa học và Công nghệ Đại học Đà Nẵng , Tập 1, số 5(2017): (76-80).