Thiết kế bộ điều khiển thích nghi cho tay máy robot có xét đến mô hình của động cơ truyền động
Nghiên cứu được thực hiện bởi nhóm tác giả Bùi Hữu Thành, Lê Tiến Dũng thuộc Trường Đại học Bách khoa – Đại học Đà Nẵng và Nhà máy Lọc dầu Dung Quất, Công ty Lọc hóa dầu Bình Sơn. Nghiên cứu được đăng trên tạp chí Khoa học và Công nghệ Đại học Đà Nẵng, Tập 1, số 110(2017): (80-85).
Ngày nay, việc ứng dụng các kỹ thuật điều khiển thông minh để điều khiển tay máy robot công nghiệp nhận được rất nhiều sự quan tâm. Quá trình thiết kế các bộ điều khiển robot thường chỉ tập trung vào phần động học. Trong khi mô hình động lực học của robot thông thường được xây dựng với tín hiệu đầu vào là mô-men truyền động cho các khớp. Các tín hiệu mô-men này là tín hiệu ra của bộ điều khiển. Và các nghiên cứu về điều khiển robot xem cơ cấu truyền động là lý tưởng, nghĩa là bộ điều khiển yêu cầu mô- men bao nhiêu thì cơ cấu chấp hành thực hiện chính xác mô-men yêu cầu đó.
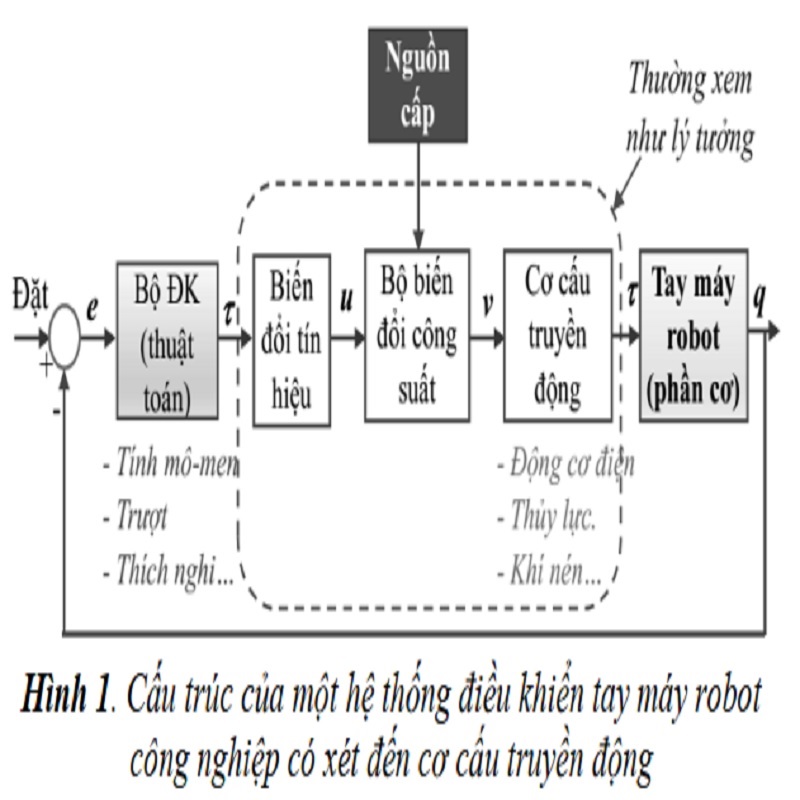
Trong thực tế, cấu trúc đầy đủ của một hệ thống điều khiển tay máy robot công nghiệp được thể hiện như Hình 1. Phần truyền động cho các khớp của tay máy robot bao gồm Bộ biến đổi tín hiệu, Bộ biến đổi công suất và Cơ cấu truyền động thường bị bỏ qua và xem là lý tưởng trong cách tiếp cận truyền thống. Thực tế phần truyền động này không lý tưởng, và việc điều khiển mô-men của cơ cấu truyền động phụ thuộc vào tải trọng là các khớp và thanh của robot. Vì vậy, để thiết kế được chính xác tín hiệu điều khiển nhằm điều khiển chính xác tay máy robot bám theo các quỹ đạo mong muốn, cần thiết phải tính đến mô hình của cơ cấu truyền động.
Để giải quyết vấn đề nêu trên, đã có một số công trình đi trước nghiên cứu đề xuất các giải pháp điều khiển. Trong bài báo, các tác giả Claudio Urrea vàJohn Kern đã nghiên cứu mô hình hóa, mô phỏng động cơ điện một chiều có xét đến tải là cánh tay robot. Các tác giả đã dùng mô hình toán của động cơ đề xuất một số phương pháp điều khiển tốc độ, điều khiển vị trí của động cơ servo HS 755 HB. Tác giả Goor trong bài báo đã chứng tỏ sự quan trọng của động lực học cơ cấu truyền động trong điều khiển robot và đã chỉ ra được động lực học của động cơ chi phối như thế nào đến các hành động của robot. Trong bài báo, tác giả Rong-Jong Wai đã nghiên cứu thiết kế bộ điều khiển quỹ đạo tay máy robot 2 bậc tự do có xét đến động cơ truyền động. Bài báo đã đề xuất dùng các bộ điều khiển phản hồi tuyến tính hóa bền vững (robust feedback linearization control - RFLC) và bộ điều khiển mờ-neuron bền vững (robust neural-fuzzy-network control - RNFNC) để điều khiển quỹ đạo tay máy robot bám theo quỹ đạo mong muốn. Một số công trình nghiên cứu khác đã được công bố trong các tài liệu [4 - 6] theo hướng ứng dụng các thuật toán thông minh để đề xuất thuật toán điều khiển cho tay máy robot có xét đến động cơ truyền động. Tuy nhiên, các giải pháp đề xuất đều còn tồn tại nhược điểm là có cấu trúc thuật toán phức tạp, khối lượng tính toán lớn và thực tế là các mạng nơ-ron nhân tạo hoặc hệ logic mờ không thể ước lượng được hoàn toàn chính xác các thành phần bất định.
Trong bài báo này, chúng tôi đề xuất một thuật toán điều khiển mới cho tay máy robot công nghiệp có xét đến mô hình của động cơ truyền động. Trong đó, một mạng nơ- ron truyền thẳng với cấu trúc 3 lớp được sử dụng để ước lượng các thành phần bất định của robot. Khác với các công trình đi trước, thuật toán đề xuất bổ sung thêm một thành phần ước lượng sai số để bù sai số của mạng nơ-ron khi ước lượng các thành phần bất định. Ngoài ra, một thành phần bền vững được thêm vào để nâng cao sự ổn định của hệ thống.
Qua quá trình nghiên cứu, kết quả cho thấy quá trình thiết kế và đề xuất một thuật toán điều khiển thích nghi sử dụng mạng nơ-ron nhân tạo và bộ ước lượng sai số để điều khiển tay máy robot công nghiệp có xét đến mô hình của động cơ truyền động. Dựa trên thuật toán điều khiển trượt truyền thống, một mạng nơ-ron truyền thẳng với cấu trúc 3 lớp được sử dụng để ước lượng các thành phần bất định của robot và thay cho thành phần chuyển mạch của tín hiệu điều khiển. Khác với các công trình đi trước, thuật toán đề xuất bổ sung thêm một thành phần ước lượng sai số để bù sai số của mạng nơ- ron khi ước lượng các thành phần bất định. Ngoài ra, một thành phần bền vững được thêm vào để nâng cao sự ổn định của hệ thống. Sự ổn định của thuật toán được chứng minh bằng lý thuyết ổn định Lyapunov. Các mô phỏng kiểm chứng cho thấy thuật toán điều khiển của bài báo đề xuất có chất lượng bám quỹ đạo tốt hơn các thuật toán đi trước và có độ rung động (chattering) được cải thiện.
Tạp chí Khoa học và Công nghệ Đại học Đà Nẵng , Tập 1, số 110(2017): (80-85).