ABB và Bệnh viện Nhi Texas tạo ra đột phá tự động hóa để thúc đẩy nghiên cứu thần kinh
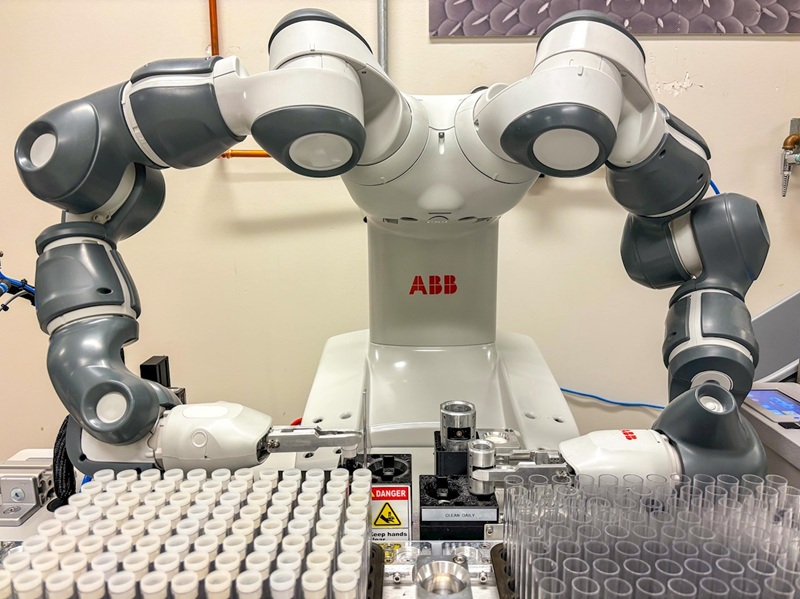
ABB Robotics và Viện nghiên cứu thần kinh Jan và Dan Duncan (Duncan NRI) tại Bệnh viện nhi Texas, một trong những cơ sở y tế nhi khoa lớn nhất Hoa Kỳ, đã đạt được bước tiến y khoa quan trọng với việc phát triển trạm chuyển bệnh phẩm tự động cho ruồi giấm Drosophila melanogaster (Fruit Fly). Giải pháp này sử dụng cobot YuMi® của ABB để hỗ trợ nghiên cứu các bệnh như Alzheimer, Huntington và Parkinson.
Đây là hệ thống tự động hóa đầu tiên không yêu cầu gây mê ruồi bằng các chất như carbon dioxide trước khi chuyển, điều vốn là một bước quan trọng trong các giải pháp tự động hóa trước đây. Việc loại bỏ bước gây mê giúp giảm tác động tiêu cực đến hành vi của ruồi và nâng cao độ chính xác của kết quả nghiên cứu.
Cobot YuMi của ABB thực hiện các thao tác tương tự như con người khi chạm và chuyển ruồi giữa các lọ, giúp các nhà khoa học tập trung vào những nhiệm vụ quan trọng hơn, chẳng hạn như khám phá các cơ chế bệnh lý và thử nghiệm hiệu quả của các loại thuốc mới trong điều trị rối loạn thần kinh. Giải pháp này không chỉ loại bỏ nhu cầu gây mê trước khi chuyển mà còn nâng cao độ chính xác của kết quả nghiên cứu và tăng tốc quy trình.
“Dù tự động hóa phòng thí nghiệm đã có nhiều bước tiến trong những năm gần đây, một số công việc quan trọng vẫn phải thực hiện thủ công, có thể ảnh hưởng đến kết quả nghiên cứu,” Jose-Manuel Collados, Giám đốc Dòng sản phẩm Robot dịch vụ ABB, cho biết. “Cobot YuMi của chúng tôi có thể hoạt động độc lập nhưng vẫn phối hợp nhịp nhàng, giúp tự động hóa nhiệm vụ phức tạp là chuyển ruồi sống giữa các lọ.”
Drosophila melanogaster, hay còn gọi là ruồi giấm, đã được sử dụng rộng rãi trong nghiên cứu về di truyền, phát triển và hành vi. Với nhiều đặc điểm sinh học tương đồng với con người, loài ruồi này đóng vai trò quan trọng trong các nghiên cứu về bệnh thần kinh trên toàn thế giới.
Trong quá trình bảo dưỡng định kỳ, các nhà nghiên cứu cần cho ruồi giấm ăn bằng cách chuyển chúng vào các lọ chứa thức ăn tươi mới, thực hiện mỗi 30 ngày một lần. Một phòng thí nghiệm trung bình có khoảng 20.000 lọ, và các nhà nghiên cứu dành khoảng 20% thời gian làm việc hàng ngày để thực hiện quá trình “lật ruồi” – thao tác đặt một lọ đựng thức ăn tươi lên trên lọ cũ, sau đó gõ nhẹ để chuyển ruồi sang lọ mới. Trước đây, mọi nỗ lực tự động hóa quy trình này đều đòi hỏi phải đưa ruồi ra khỏi lọ trong quá trình chuyển, khiến việc gây mê trở thành một bước bắt buộc.
ABB Robotics đã hợp tác cùng các nhà nghiên cứu tại Duncan NRI để thiết kế và chế tạo trạm chuyển ruồi, bao gồm cobot YuMi, một bàn xếp chứa các lọ chuyển ruồi, một thiết bị quét mã vạch và dán nhãn, cùng một máng đổ rác.
Tiến sĩ Juan Botas, Giáo sư Khoa Di truyền học Phân tử và Con người tại Cao đẳng Y Baylor, đồng thời là nhà nghiên cứu chính tại Duncan NRI, chia sẻ: “Giải pháp sáng tạo này là kết quả của hơn hai năm hợp tác chặt chẽ giữa chúng tôi và ABB Robotics nhằm đẩy nhanh nghiên cứu y sinh.” Ông cũng cho biết, sự kết hợp giữa sinh học ruồi giấm và chuyên môn nghiên cứu thông lượng cao của nhóm ông, cùng với kiến thức tự động hóa từ các kỹ sư ABB, đã cho phép phát triển một hệ thống cobot giúp tiết kiệm thời gian, giảm căng thẳng cho mẫu nghiên cứu và tạo điều kiện thực hiện nhiều thí nghiệm song song hơn.
YuMi thực hiện toàn bộ quy trình “lật ruồi giấm” thông qua 10 bước được lập trình sẵn. Tương tự con người, robot này nhấc lọ chứa ruồi sống, mở nắp axetat cellulose bảo vệ, đặt lọ lên trên lọ thức ăn tươi, chạm nhẹ để chuyển ruồi, đậy nắp, dán nhãn, quét mã vạch, rồi xếp lọ vào giá đựng. Sau cùng, nó loại bỏ các lọ thức ăn cũ để tránh nguy cơ lây nhiễm chéo.
Một tính năng quan trọng của hệ thống này là khả năng quét mã vạch và in nhãn, giúp ghi nhận thông tin về chủng và kiểu gen của ruồi trong quá trình chuyển. Điều này đảm bảo việc theo dõi và quản lý các mẫu Drosophila một cách chính xác. Công nghệ cảm biến tiên tiến giúp YuMi đặt lọ vào các giá đựng tiêu chuẩn, cho phép phòng thí nghiệm tiếp tục sử dụng cơ sở vật chất hiện có, từ đó giảm chi phí vận hành.
Quan trọng hơn, cobot YuMi được thiết kế để có thể làm việc an toàn trong môi trường hợp tác với con người. Các cánh tay cảm biến chuyển động có thể phát hiện sự hiện diện của con người hoặc vật thể xung quanh, tự động dừng hoạt động ngay lập tức để ngăn ngừa tai nạn, đảm bảo không gian làm việc an toàn cho tất cả các bên.