Ứng dụng mạng Anfis trong điều khiển trượt đồng bộ tay máy robot song song phẳng ba bậc tự do
Tay máy robot song song phẳng ba bậc tự do là một trong những cấu trúc robot có nhiều ưu điểm về độ cứng vững, độ chính xác và khả năng mang tải so với các loại tay máy nối tiếp. Tuy nhiên, đặc tính động học khép kín cùng với sự tồn tại của các tham số bất định, ma sát và nhiễu ngoại lực khiến bài toán điều khiển các hệ robot này trở nên phức tạp. Trong số các phương pháp điều khiển hiện đại, điều khiển trượt đồng bộ cho thấy khả năng bám quỹ đạo tốt và tính bền vững cao, song vẫn tồn tại hiện tượng dao động cao tần (chattering) do các tham số điều khiển cố định không thích nghi kịp với sự thay đổi của hệ thống.
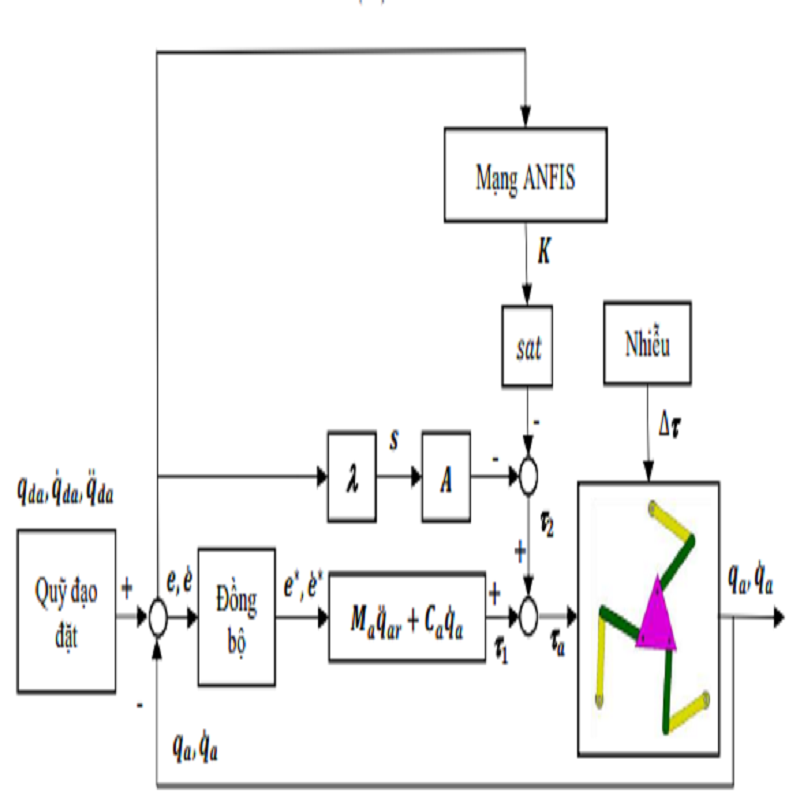
Bài báo này đề xuất một phương pháp điều khiển trượt đồng bộ có khả năng tự điều chỉnh tham số thông qua việc tích hợp mạng ANFIS. Bộ điều khiển được xây dựng dựa trên sai số đồng bộ và sai số đồng bộ chéo, kết hợp với thuật toán điều khiển trượt truyền thống. Mạng ANFIS được sử dụng nhằm tự động điều chỉnh các tham số của ma trận khuếch đại trong luật điều khiển, giúp bù nhanh các ảnh hưởng của tham số bất định, lực ma sát và nhiễu ngoại lực.
Thuật toán đề xuất được áp dụng cho tay máy robot song song phẳng ba bậc tự do dạng 3-RRR và được kiểm chứng thông qua mô phỏng trên môi trường MATLAB/Simulink với nhiều kịch bản tải và nhiễu khác nhau. Kết quả mô phỏng cho thấy bộ điều khiển đề xuất cải thiện rõ rệt độ chính xác bám quỹ đạo, giảm đáng kể sai số và gần như loại bỏ hiện tượng chattering so với các bộ điều khiển truyền thống.
1. ĐẶT VẤN ĐỀ
Robot song song, trong đó khâu chấp hành cuối được liên kết với đế thông qua nhiều chuỗi khâu động học song song, được xem như một hệ cơ khí có động học khép kín. Nhờ cấu trúc này, robot song song có nhiều ưu điểm vượt trội như độ chính xác cao, độ cứng vững lớn và khả năng mang tải tốt hơn so với robot nối tiếp. Tuy nhiên, chính cấu trúc khép kín cũng làm cho mô hình động lực học của hệ trở nên phức tạp, đồng thời xuất hiện các cấu hình kỳ dị gây khó khăn cho việc điều khiển.
Trong thời gian gần đây, nhiều nghiên cứu đã tập trung vào bài toán điều khiển tay máy robot song song phẳng ba bậc tự do, đặc biệt là cấu trúc 3-RRR. Các phương pháp điều khiển như điều khiển mô men tính toán và điều khiển trượt đã chứng minh được hiệu quả trong việc bám quỹ đạo. Tuy nhiên, các phương pháp này thường đòi hỏi mô hình chính xác và khó đảm bảo hiệu suất khi hệ thống chịu tác động của nhiễu ngoại lực và các tham số bất định.
Điều khiển trượt đồng bộ được phát triển nhằm khai thác thông tin sai số tương quan giữa các khớp, giúp cải thiện khả năng phối hợp chuyển động. Mặc dù mang lại hiệu quả cao, phương pháp này vẫn gặp hạn chế khi các tham số điều khiển được lựa chọn cố định, dẫn đến hiện tượng chattering khi điều kiện làm việc thay đổi. Để khắc phục vấn đề này, việc kết hợp điều khiển trượt với các phương pháp thông minh như điều khiển mờ và mạng nơ ron đã được đề xuất.
Xuất phát từ thực tế đó, bài báo này đề xuất một bộ điều khiển trượt đồng bộ có khả năng tự điều chỉnh tham số dựa trên mạng ANFIS với cấu trúc đơn giản, nhằm nâng cao hiệu quả điều khiển và giảm thiểu hiện tượng chattering cho tay máy robot song song phẳng ba bậc tự do.
2. MÔ HÌNH ĐỘNG LỰC HỌC CỦA TAY MÁY ROBOT
Mô hình động lực học của tay máy robot song song phẳng ba bậc tự do dạng 3-RRR được xây dựng trong không gian khớp chủ động. Phương trình động lực học tổng quát của hệ được biểu diễn dưới dạng:
Ma(qa)q¨a+Ca(qa,q˙a)q˙a+Δτ=τa\mathbf{M}_a(\mathbf{q}_a)\ddot{\mathbf{q}}_a + \mathbf{C}_a(\mathbf{q}_a,\dot{\mathbf{q}}_a)\dot{\mathbf{q}}_a + \Delta \boldsymbol{\tau} = \boldsymbol{\tau}_aMa(qa)q¨a+Ca(qa,q˙a)q˙a+Δτ=τa
Trong đó, τa\boldsymbol{\tau}_aτa là véc tơ mô men tác động tại các khớp chủ động, qa\mathbf{q}_aqa, q˙a\dot{\mathbf{q}}_aq˙a, q¨a\ddot{\mathbf{q}}_aq¨a lần lượt là véc tơ vị trí, vận tốc và gia tốc khớp. Ma trận Ma\mathbf{M}_aMa biểu diễn quán tính của hệ, Ca\mathbf{C}_aCa là ma trận Coriolis và ly tâm, còn Δτ\Delta \boldsymbol{\tau}Δτ bao gồm lực ma sát và các nhiễu ngoại lực.
Các ma trận này được suy ra từ mô hình hình học và các ma trận Jacobian của hệ, cho phép mô tả đầy đủ động học và động lực học của tay máy.
3. ĐIỀU KHIỂN TRƯỢT TRUYỀN THỐNG
Điều khiển trượt truyền thống được xây dựng dựa trên việc thiết kế một mặt trượt phụ thuộc vào sai số vị trí và vận tốc của các khớp. Mặt trượt được định nghĩa như:
s=e˙+λe\mathbf{s} = \dot{\mathbf{e}} + \boldsymbol{\lambda}\mathbf{e}s=e˙+λe
Trong đó, e\mathbf{e}e là sai số vị trí khớp, λ\boldsymbol{\lambda}λ là ma trận đường chéo các hằng số dương xác định. Luật điều khiển bao gồm hai thành phần là thành phần liên tục đảm bảo bám mặt trượt và thành phần không liên tục nhằm đưa trạng thái hệ về mặt trượt khi bị nhiễu.
Mặc dù đảm bảo tính ổn định theo tiêu chuẩn Lyapunov, bộ điều khiển trượt truyền thống thường gây ra hiện tượng dao động cao tần do hàm dấu trong luật điều khiển, làm giảm chất lượng điều khiển và ảnh hưởng đến cơ cấu chấp hành.
4. ĐIỀU KHIỂN TRƯỢT ĐỒNG BỘ KẾT HỢP MẠNG ANFIS
Để nâng cao hiệu quả điều khiển và khắc phục hạn chế của điều khiển trượt truyền thống, bài báo xây dựng bộ điều khiển trượt đồng bộ dựa trên sai số đồng bộ và sai số đồng bộ chéo giữa các khớp. Sai số đồng bộ được định nghĩa thông qua sự chênh lệch sai số giữa các khớp, trong khi sai số đồng bộ chéo cho phép kết hợp đồng thời thông tin sai số vị trí và sai số đồng bộ.
Luật điều khiển trượt đồng bộ được xây dựng tương tự điều khiển trượt truyền thống nhưng sử dụng mặt trượt mở rộng. Để tăng tính thích nghi, mạng ANFIS được tích hợp nhằm tự động điều chỉnh các hệ số khuếch đại trong ma trận điều khiển. Đầu vào của mạng ANFIS là sai số đồng bộ chéo và đạo hàm của nó, đầu ra là các tham số điều khiển tương ứng.
Khác với các nghiên cứu trước sử dụng mạng ANFIS có cấu trúc phức tạp, mạng ANFIS trong bài báo này được thiết kế với cấu trúc một lớp và số luật điều khiển hạn chế, giúp giảm đáng kể khối lượng tính toán và yêu cầu phần cứng, trong khi vẫn đảm bảo hiệu quả điều khiển.
5. MÔ PHỎNG VÀ KIỂM CHỨNG
Thuật toán điều khiển đề xuất được kiểm chứng thông qua mô phỏng trên phần mềm MATLAB/Simulink với mô hình cơ khí của tay máy được xây dựng trong môi trường SolidWorks. Các thông số hình học, khối lượng và mô men quán tính của các khâu được lựa chọn theo mô hình thực tế.
Quỹ đạo đặt cho khâu chấp hành cuối là quỹ đạo tròn trong mặt phẳng, trong khi hệ thống chịu tác động của lực ma sát Coulomb, nhiễu ngoại lực và sự thay đổi tải trọng trong quá trình làm việc. Để đánh giá hiệu quả, bộ điều khiển đề xuất được so sánh với các bộ điều khiển phổ biến như điều khiển mô men tính toán, điều khiển mô men đồng bộ, điều khiển trượt truyền thống và điều khiển trượt đồng bộ.
Kết quả mô phỏng cho thấy bộ điều khiển đề xuất đạt sai số bám quỹ đạo nhỏ nhất trong tất cả các trường hợp khảo sát. Sai số RMSE theo cả tọa độ và góc quay của khâu chấp hành cuối đều giảm đáng kể so với các bộ điều khiển còn lại, đồng thời hiện tượng chattering gần như được loại bỏ hoàn toàn.
6. KẾT LUẬN
Bài báo đã đề xuất thành công một bộ điều khiển trượt đồng bộ ứng dụng mạng ANFIS cho tay máy robot song song phẳng ba bậc tự do. Việc kết hợp sai số đồng bộ, sai số đồng bộ chéo với khả năng tự điều chỉnh tham số của mạng ANFIS giúp hệ thống nâng cao đáng kể độ chính xác bám quỹ đạo, giảm dao động và thích nghi tốt với các nhiễu và tham số bất định.
Kết quả mô phỏng đã chứng minh tính hiệu quả và khả thi của phương pháp đề xuất, mở ra hướng nghiên cứu và ứng dụng tiềm năng cho các hệ robot song song có cấu trúc tương tự trong thực tế
Tạp chí khoa học và công nghệ đại học Đà Nẵng, VOL. 17, NO. 1.1, 2019 (nhahuy)