Điều khiển trượt thích nghi tải cho hệ robot song song 6 bậc tự do Stewart platform
Nghiên cứu do nhóm các tác giả gồm Trần Trung Kiên (Viện Tự động hóa Kỹ thuật Quân sự), Vũ Đức Cường, Nguyễn Danh Huy, Nguyễn Tùng Lâm (PTN Điều khiển chuyển động và robot ứng dụng (MoCAR), Trường Điện-Điện tử, Đại học Bách Khoa Hà Nội), Nguyễn Trung Kiên và Nguyễn Vũ (Viện Khoa học và Công nghệ Quân sự) thực hiện.
Gough-Stewart platform, còn được gọi là Stewart platform, là một loại robot song song phức tạp có 6 bậc tự do (DOF). Cấu tạo của robot bao gồm 3 phần chính: 1) một bệ cố định để cố định hệ thống; 2) một bệ di động với 6 bậc tự do, được kết nối bởi 3) sáu chân khớp trượt có khả năng thay đổi chiều dài. Trong bối cảnh này của Stewart platform, vị trí và góc quay của bệ di động có thể được điều khiển bằng cách điều chỉnh sự di chuyển của các chân. Do cấu trúc song song, robot Stewart nói riêng, và các hệ thống điều khiển song song nói chung, thường được sử dụng trong các ứng dụng yêu cầu độ chính xác cao và phản hồi nhanh. Ví dụ, Stewart platform ứng dụng trong việc mô phỏng chuyển động cho các phương tiện như là ô tô hoặc máy bay. Hơn nữa, nó còn được ứng dụng trong thực tế ảo và giải trí. Bên cạnh đó, Stewart platform có thể được ứng dụng trong các nghiên cứu liên ngành, từ thiên văn học đến y học. Về khía cạnh điều khiển, mục tiêu điều khiển của robot Stewart platform là điều khiển trạng thái của nó - bao gồm hướng và vị trí - bám theo giá trị đặt với sai số nhỏ nhất có thể. Do đó, có hai loại phương pháp điều khiển cho Stewart platform: 1) điều khiển dựa trên động học và 2) điều khiển dựa trên động lực học. Thứ nhất, phương pháp điều khiển dựa trên động học yêu cầu xác định động học thuận và nghịch của hệ thống. Sau đó, các cơ cấu chấp hành sẽ bám theo kết quả tính toán động học nghịch, là độ dài tham chiếu cho mỗi chân. Tuy nhiên, phương pháp điều khiển này có thể gặp một số vấn đề như xung đột giữa các cơ cấu chấp hành và độ chính xác giảm do sai lệch trong tính toán động học. Vì vậy, điều khiển dựa trên động lực học được ưu tiên sử dụng trong các trường hợp yêu cầu độ chính xác cao và tốc độ đáp ứng nhanh. Khác với điều khiển dựa trên động học, phương pháp điều khiển dựa trên động lực học đòi hỏi khối lượng tính toán lớn về toán học và vật lý. Khi đó, Stewart platform được phân tích thông qua phương trình vi phân bậc hai. Điều này cho phép mô tả hành vi của hệ thống chính xác hơn và đảm bảo rằng điều khiển dựa trên mô hình ổn định và giảm thiểu sai số. Nhiều chiến lược điều khiển đã được đề xuất trong các nghiên cứu trước đó để điều khiển trạng thái của bệ di động bám trạng thái tham chiếu dưới mô hình động lực học. Một trong những chiến lược điều khiển cổ điển với hiệu suất tốt, PID (điều khiển tỷ lệ - tích phân - đạo hàm), được đưa ra trong rộng rãi. Cụ thể hơn, có hai phương pháp điều khiển PD (tỷ lệ - đạo hàm) cho các robot song song trong 2 không gian mô hình động lực học: 1) trong không gian của end-effector (task space), với vị trí và hướng của bệ di động là các biến trạng thái, và 2) trong không gian của các chân, với độ dịch chuyển của cơ cấu chấp hành được sử dụng để mô tả hệ thống. Để tối ưu các tham số của bộ điều khiển PD, góc nhìn của điều khiển tuyến tính tối ưu (LQR, LQG), các tham số có thể được xác định bằng cách tối ưu hóa hàm chi phí bậc hai của các trạng thái và tín hiệu điều khiển dưới các trọng số kèm theo. Với sự phát triển của tính toán số trong những năm gần đây, các kỹ thuật điều khiển robot tân tiến được áp dụng rộng rãi để phù hợp với các hệ phi tuyến mạnh như Stewart platform. Ví dụ, phương pháp điều khiển chống nhiễu chủ động (ADRC) là một phương pháp điều khiển PD nâng cao, đã được sử dụng rộng rãi để bù nhiễu và các thành phần bất định trong mô hình và đo lường. Hơn nữa, cho các ứng dụng yêu cầu độ chính xác cao và phản hồi nhanh, phương pháp điều khiển chế độ trượt (SMC) dựa trên mô hình. SMC đã trở nên phổ biến trong những năm gần đây vì khả năng xử lý các yếu tố không chắc chắn và phi tuyến hiện diện trong động lực học của Stewart platform, đồng thời duy trì tính ổn định và sự bền vững dưới sự thay đổi của môi trường và nhiễu. Hơn nữa, chiến lược chế độ trượt có lợi thế lớn ở khả năng dễ dàng cải tiến và kết hợp với các phương pháp khác để thích nghi, và bù nhiễu, hoặc phát hiện lỗi. Như đã đề cập ở trên, Stewart platform được ứng dụng trong các ứng dụng yêu cầu có tải trọng, do đó, nó có thể đối mặt với thay đổi tải trọng trong quá trình làm việc. Cụ thể hơn, trong các ứng dụng liên quan đến các mô phỏng phương tiện, nâng tải, khi đó thuộc tính tải trọng, khối lượng và mô men quán tính, có thể thay đổi trong quá trình hoạt động, các thuộc tính của bệ di chuyển có thể thay đổi bởi khối lượng và mô men quán tính. Hệ quả là, khi tải trọng thay đổi, mô hình mô tả cũ trở nên lỗi thời, dẫn đến giảm hiệu suất điều khiển đáng kể. Trong điều khiển chế độ trượt, ta đã biết rằng đây là chiến lược điều khiển dựa trên mô hình, nghĩa là tín hiệu điều khiển phụ thuộc vào các tham số mô hình, bao gồm khối lượng và mômen quán tính của tải trọng. Để giải quyết vấn đề này, một mô hình thích nghi được trình bày trong công bố này. Cụ thể hơn, dựa trên cấu trúc vốn có của bộ điều khiển chế độ trượt (SMC), được thể hiện dựa trên mô hình động lực học của hệ thống, liên quan chặt chẽ và mật thiết với các thuộc tính cơ học (khối lượng, mô men quán tính), các tác giả đề xuất một tín hiệu điều khiển dựa các giá trị ước lượng được của khối lượng và mômen quán tính. Sau đó, các tác giả đề xuất một luật cập nhật cho các giá trị ước lượng của các thuộc tính cơ học này. Luật tiếp cận này được chứng minh ổn định dựa trên lý thuyết ổn định Lyapunov. Thêm vào đó, để đánh giá một cách khách quan hiệu suất cũng như tính đúng đắn của bộ điều khiển được đề xuất, các tác giả xây dựng mô hình bán vật lý (Quasi-Physical Model) của Stewart platform. Mô hình bán vật lý được xây dựng trên nền tảng MATLAB/Simulink bằng việc sử dụng Simscape Multibody Toolbox. Với công cụ này, bằng việc thiết lập những khớp nối, khớp chuyển động và cơ cấu chấp hành của robot, ta có thể mô hình hóa robot một cách trực quan và thể hiện được gần đúng những đáp ứng của robot so với thực tế. Đóng góp của công trình:
1. Cung cấp một thuật toán thích nghi tải dựa trên kỹ thuật điều khiển mặt trượt để xác định thuộc tính tải, và đáp ứng với những thay đổi của tải trong quá trình hoạt động.
2. Đưa ra các mô phỏng dựa trên mô hình bán vật lý (Simscape - MATLAB) để kiểm chứng hiệu quả của chiến lược điều khiển được đề xuất. Kết quả được so sánh với cách tiếp cận điều khiển chế độ trượt truyền thống.
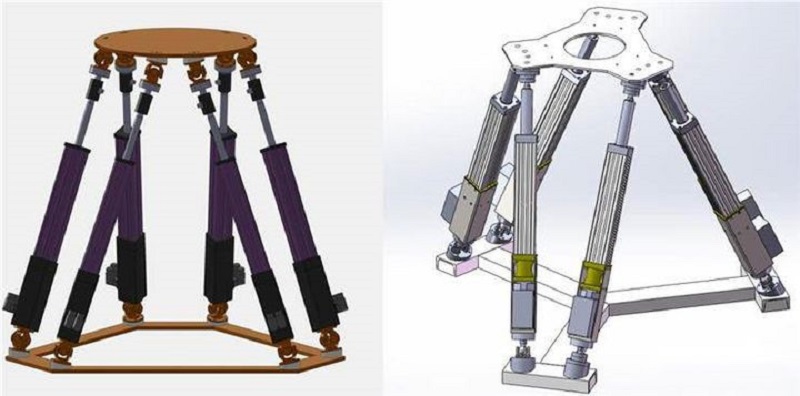
Hình minh họa. Nguồn Internet
Tổng kết lại, công trình này đã giới thiệu về hệ thống robot song song 6 bậc tự do được sử dụng rộng rãi nhiều trong các hệ thống yêu cầu có độ chính xác cao. Tuy nhiên, dưới cấu trúc điều khiển trượt thông thường, với các tải không cố định thì hiệu suất của hệ thống có thể bị suy giảm một cách đáng kể, do đó, một thuật toán thích nghi tải trọng của mô hình đã được đưa ra. Các kết quả cho thấy sự vượt trội về hiệu suất cũng như độ chính xác mà cấu trúc này mang lại, chứng tỏ rằng nó có thể được ứng dụng một cách hiệu quả trong các mô hình thực tế. Tuy nhiên, trong nghiên cứu này, mô hình nhiễu chưa được xem xét, do đó, trong tương lai, nhóm nghiên cứu sẽ đề xuất thêm các chiến lược điều khiển mới nhằm cải thiện hiệu suất điều khiển dưới tác động của nhiễu và triển khai trên mô hình thực nghiệm.
Tạp chí Đo lường, Điều khiển và Tự động hóa 2025, 29(1): 42-50 (ctngoc)