Năm Đánh Đổi Thiết Kế Cần Biết Khi Lựa Chọn Động Cơ Bước
Những quyết định thiết kế đúng đắn giúp đảm bảo chuyển động ổn định, chính xác và đáng tin cậy trong suốt vòng đời hệ thống.
Động cơ bước ngày càng được sử dụng rộng rãi trong các hệ thống tự động hóa nhờ kích thước nhỏ gọn, chi phí hợp lý và độ chính xác cao. Tuy nhiên, hiệu suất thực tế không chỉ phụ thuộc vào thông số ghi trên nhãn sản phẩm. Trong quá trình thiết kế hệ thống, có năm đánh đổi then chốt quyết định liệu chuyển động có thực sự ổn định, chính xác và đáng tin cậy trong môi trường vận hành hay không.

1. Đừng nhầm mô-men giữ với mô-men thực tế khi vận hành
Mô-men giữ (holding torque) thường là thông số đầu tiên các kỹ sư nhìn vào khi chọn động cơ — con số này rõ ràng, dễ so sánh và thường là giá trị cao nhất trên datasheet. Nhưng đây chính là bẫy phổ biến nhất.
Thực tế là mô-men khả dụng giảm dần khi tốc độ tăng, trong khi gia tốc lại làm tăng nhu cầu mô-men lên động cơ. Một hệ thống trông có vẻ đủ công suất trên giấy hoàn toàn có thể bị hãm kẹt khi gia tốc, bỏ bước dưới tải đột biến, hoặc hoạt động không nhất quán qua các điều kiện vận hành khác nhau. Những lỗi này thường không hiển thị ngay, đặc biệt trong hệ thống vòng hở nơi sai lệch vị trí không được tự động phát hiện.
Để đảm bảo hoạt động tin cậy, mô-men dự phòng cần được đánh giá trên toàn bộ biên dạng chuyển động, bao gồm tốc độ, gia tốc, quán tính tải và chu kỳ làm việc.
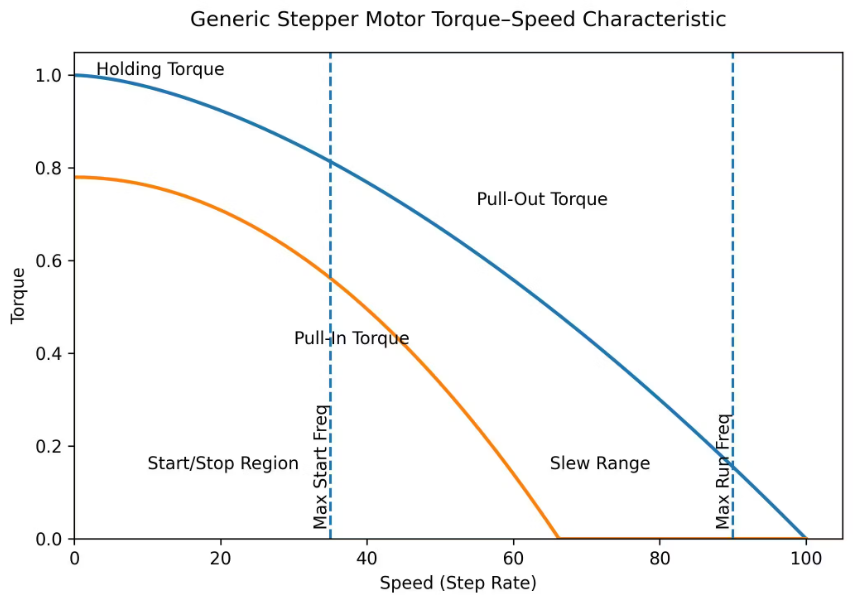
Đường cong mô-men xoắn – tốc độ của động cơ bước điển hình này cho thấy mô-men xoắn khả dụng giảm dần khi tốc độ tăng lên, qua đó nhấn mạnh sự cần thiết phải kiểm tra biên độ dự trữ mô-men xoắn trong toàn bộ dải vận hành và các điều kiện tải dự kiến (nguồn: machinedesign.com).
2. Cộng hưởng cơ học — mối nguy ẩn giới hạn hiệu suất thực
Sau khi đáp ứng yêu cầu mô-men, nhiều kỹ sư cho rằng động cơ sẽ hoạt động ổn định trên toàn dải tốc độ. Thực tế, động cơ bước kích thích hệ thống cơ học theo những cách có thể gây ra cộng hưởng và mất ổn định.
Cộng hưởng xảy ra khi tần số bước của động cơ trùng khớp với tần số tự nhiên của hệ thống động cơ-tải. Vì chuyển động diễn ra theo từng bước rời rạc, dao động xoắn có thể phát triển ở một số dải tốc độ nhất định, biểu hiện qua rung động, tiếng ồn bất thường hoặc định vị không nhất quán. Đáng lo hơn, các biểu hiện này thường gián đoạn, khiến việc chẩn đoán trong giai đoạn kiểm thử ban đầu trở nên rất khó khăn.
Quán tính tải, độ cứng ghép nối và điều kiện lắp đặt đều ảnh hưởng đến cách các hiện tượng này biểu hiện. Vì vậy, động học cơ học phải được xem xét song song với việc lựa chọn thông số điện — không thể tách rời.
3. Nhiệt độ tích lũy theo thời gian, không chỉ theo tải
Khi động cơ đáp ứng yêu cầu chuyển động trong điều kiện danh định, dễ có giả định rằng nhiệt sinh ra sẽ ở mức chấp nhận được. Nhưng động cơ bước tạo nhiệt liên tục — kể cả khi đứng yên giữ vị trí — vì dòng điện vẫn được duy trì bất kể có chuyển động hay không.
Qua các chu kỳ làm việc dài, nhiệt tích lũy khiến điện trở cuộn dây tăng, từ đó làm giảm khả năng mô-men. Trong trường hợp nghiêm trọng, nhiệt độ quá cao có thể rút ngắn tuổi thọ cách điện và giảm độ tin cậy tổng thể của hệ thống. Những ảnh hưởng này thường xuất hiện từ từ nên dễ bị bỏ qua trong quá trình kiểm thử ban đầu.
Chiến lược giảm dòng điện khi đứng yên và duy trì biên độ nhiệt bảo thủ là những biện pháp cần cân nhắc từ sớm trong thiết kế.
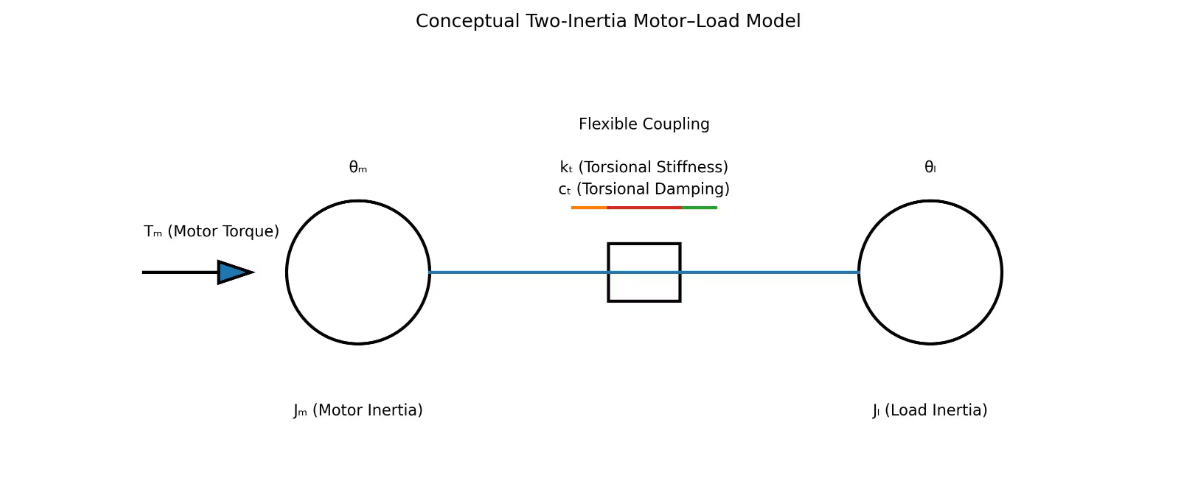
Mô hình khái niệm hai quán tính của hệ động cơ – tải minh họa cách độ cứng xoắn và tỷ lệ quán tính ảnh hưởng đến hiện tượng cộng hưởng của hệ thống, yếu tố cần được đánh giá trong quá trình lựa chọn và hiệu chỉnh (nguồn: machinedesign.com).
4. Chiến lược điều khiển quyết định sự mượt mà của chuyển động
Động cơ bước thường gắn liền với điều khiển vòng hở đơn giản — và sự đơn giản đó chính là một trong những lý do chúng được ưa chuộng. Tuy nhiên, chiến lược điều khiển chuyển động đóng vai trò rất lớn trong việc hệ thống thực sự hoạt động như thế nào dưới tải.
Biên dạng gia tốc và giảm tốc, cài đặt dòng điện drive và điện áp nguồn đều ảnh hưởng đến khả năng phát huy mô-men khả dụng một cách mượt mà trong suốt biên dạng chuyển động. Khi các thông số điều khiển không phù hợp với hệ thống cơ học, kết quả là hãm kẹt khi gia tốc, định vị không nhất quán hoặc rung động quá mức — những triệu chứng thường bị nhầm là vấn đề cơ học hoặc lựa chọn sai kích thước.
Chiến lược điều khiển chuyển động phải được xem như một phần của quá trình lựa chọn động cơ, không phải bước tinh chỉnh sau cùng.
5. Vòng hở đồng nghĩa với sai lệch không được nhìn thấy
Trong hệ thống vòng hở, vị trí được suy ra chứ không được đo trực tiếp. Điều này giúp đơn giản hóa thiết kế và giảm chi phí — nhưng cũng đồng nghĩa với việc hệ thống không có khả năng phát hiện và phản hồi với các lỗi xảy ra.
Bỏ bước, nhiễu tải hoặc hãm kẹt thoáng qua có thể không được nhận ra ngay, khiến sai lệch vị trí tích lũy theo thời gian. Trong các ứng dụng có ràng buộc về an toàn hoặc chất lượng, mất vị trí không được phát hiện có thể dẫn đến hậu quả nghiêm trọng hơn nhiều so với chỉ một sai lệch định vị đơn thuần.
Mức độ giám sát cần thiết — bao gồm phản hồi vị trí, phát hiện hãm kẹt hoặc các cơ chế giám sát khác — phải được cân nhắc rõ ràng trong giai đoạn đặc tả hệ thống.
Động cơ bước vẫn là giải pháp chuyển động thực tiễn và hiệu quả trong nhiều hệ thống tự động hóa. Nhưng để đạt được hiệu suất dự đoán được, năm yếu tố trên cần được giải quyết từ giai đoạn thiết kế, không phải sau khi hệ thống đã được lắp đặt. Khi được đặc tả một cách kỹ lưỡng, những hệ thống dùng động cơ bước sẽ ổn định hơn, dễ vận hành hơn và ít phát sinh vấn đề về sau hơn.
https://www.machinedesign.com/mechanical-motion-systems/article/55361639/five-design-tradeoffs-when-specifying-stepper-motors