Robot lấy cảm hứng từ côn trùng có khả năng theo dõi mùi hương ngay cả khi chỉ có một "ăng-ten" hoạt động
Một nhóm nghiên cứu hợp tác đã phát triển một hệ thống robot lấy cảm hứng từ sinh học, dựa trên hành vi của côn trùng, có khả năng định vị nguồn mùi cả trong nhà và ngoài trời với độ chính xác ổn định, ngay cả khi một trong hai cảm biến bị hỏng. Nhóm nghiên cứu bao gồm Phó Giáo sư Shigaki Shunsuke thuộc Viện Tin học Quốc gia (NII), Giáo sư Kurabayashi Daisuke thuộc Trường Kỹ thuật, Đại học Khoa học Tokyo và Phó Giáo sư Owaki Dai thuộc Trường Cao học Kỹ thuật, Đại học Tohoku.
Những con tằm truyền cảm hứng cho thiết kế bền bỉ.
Bước tiến này áp dụng các nguyên lý sinh học của loài tằm (Bombyx mori), loài có thể duy trì khả năng định hướng hiệu quả chỉ bằng một râu nếu râu còn lại bị mất. Bằng cách tích hợp các chiến lược hành vi sinh học này vào thiết kế robot, các nhà nghiên cứu đã đề xuất một khuôn khổ mới để phát triển các hệ thống tự hành có khả năng phục hồi cao. Kết quả nghiên cứu đã được công bố trên tạp chí npj Robotics vào ngày 9 tháng 2 năm 2026.
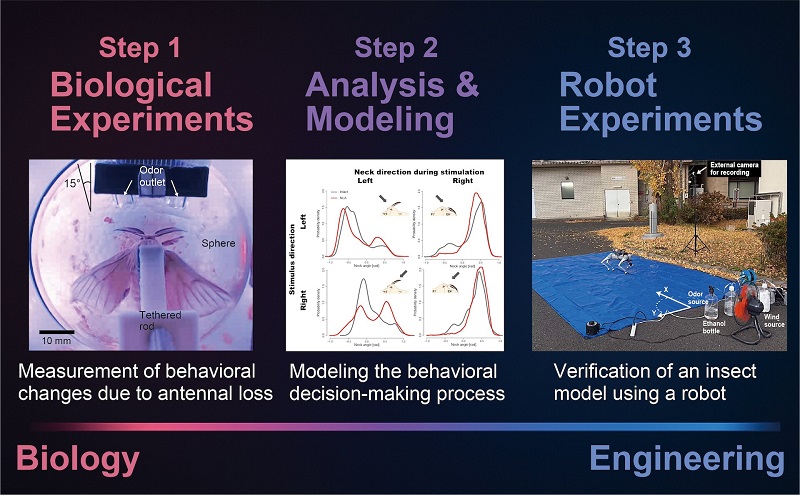
Làm sáng tỏ các cơ chế theo dõi mùi hương thích nghi của côn trùng: Cách tiếp cận kết hợp giữa phân tích sinh học và tái tạo kỹ thuật. Nguồn: NII
Khả năng định vị điểm đến bằng cách sử dụng mùi hương (các chất hóa học) làm tín hiệu là một hành vi cơ bản được chia sẻ giữa nhiều sinh vật sống. Mặc dù sở hữu bộ não cực kỳ nhỏ và hệ thần kinh tương đối đơn giản, côn trùng vẫn có thể nhanh chóng phát hiện các phân tử mùi hương được gió phát tán và định hướng bản thân đến các nguồn thức ăn hoặc bạn tình tiềm năng. Khả năng định hướng bằng mùi hương này từ lâu đã được nghiên cứu từ nhiều góc độ sinh học khác nhau, bao gồm thần kinh học, di truyền học và tập tính học.
Trong những năm gần đây, ngày càng nhiều sự chú ý được hướng đến việc ứng dụng các nguyên tắc hành vi phức tạp được thể hiện bởi các sinh vật này vào các hệ thống robot. Ví dụ, các nền tảng robot có khả năng phát hiện và theo dõi nguồn mùi được dự đoán sẽ đóng vai trò then chốt trong các ứng dụng thực tế như ứng phó thảm họa, phát hiện vật liệu nguy hiểm và chất nổ, và giám sát môi trường.
Vượt qua những hạn chế của robot thông thường
Tuy nhiên, hầu hết các hệ thống robot dẫn đường bằng mùi hương thông thường được thiết kế dựa trên giả định rằng các cảm biến mùi ở cả hai phía bên trái và bên phải hoạt động đối xứng và không bị suy giảm. Trong môi trường hoạt động thực tế, sự cố hoặc hư hỏng vật lý của cảm biến có thể dẫn đến mất tín hiệu cảm giác ở một bên, điều này gây ra thách thức nghiêm trọng dẫn đến suy giảm hiệu suất đáng kể hoặc thậm chí là thất bại hoàn toàn trong việc định vị nguồn mùi. Cho đến nay, các hệ thống robot duy trì hiệu suất mạnh mẽ trong điều kiện thiếu hụt cảm giác không đối xứng như vậy vẫn chưa được thiết lập đầy đủ. Để giải quyết hạn chế này, nghiên cứu hiện tại đề xuất một khung phương pháp mới giúp đạt được khả năng định vị nguồn mùi mạnh mẽ bằng cách lấy cảm hứng từ các chiến lược hành vi thích ứng được quan sát thấy ở các sinh vật sinh học.
Trong bài báo của mình, các nhà nghiên cứu đã sử dụng tằm đực trưởng thành (Bombyx mori) làm sinh vật mẫu và phân tích hành vi định vị nguồn mùi của chúng được hướng dẫn bởi pheromone giới tính. Trong điều kiện bình thường, tằm sử dụng một cặp râu đối xứng nằm trên đầu để thu nhận thông tin khứu giác phân bố trong không gian, từ đó cho phép định vị chính xác nguồn mùi.
Đáng chú ý, các thí nghiệm về hành vi đã chứng minh rằng ngay cả sau khi mất một râu, côn trùng vẫn có khả năng tiếp cận nguồn mùi với độ chính xác cao bằng cách lựa chọn và điều chỉnh hành vi của chúng một cách thích hợp dựa trên tín hiệu khứu giác thu được từ râu còn lại. Phát hiện này cho thấy tằm tích hợp một cách linh hoạt thông tin liên quan đến vị trí phát hiện mùi ở một râu duy nhất và góc hướng hiện tại của chúng, đồng thời điều chỉnh quá trình ra quyết định hành vi của chúng một cách linh hoạt phù hợp với các điều kiện hiện hành.
Thử nghiệm chiến lược trên robot thực tế
Để kiểm chứng tính tổng quát và hiệu quả của cơ chế ra quyết định hành vi đã được xác định, các nhà nghiên cứu đã triển khai chiến lược cảm giác vận động lấy cảm hứng từ sinh học trên một nền tảng robot được trang bị hệ thống cảm biến khứu giác tương tự như của tằm. Sử dụng hệ thống robot này, họ đã tiến hành các thí nghiệm định vị nguồn mùi trong cả môi trường trong nhà được kiểm soát và môi trường ngoài trời phức tạp.
Kết quả cho thấy robot duy trì hiệu suất định vị tương đương với hiệu suất quan sát được trước khi cảm biến bị lỗi, ngay cả trong điều kiện một trong hai cảm biến hai bên bị vô hiệu hóa, không chỉ trong nhà mà còn ở môi trường ngoài trời có nhiều nhiễu loạn đáng kể. Chiến lược thích ứng lấy cảm hứng từ côn trùng đã thành công trong việc duy trì tỷ lệ thành công cao và hiệu suất tìm kiếm hiệu quả. Những kết quả này cho thấy khả năng điều hướng dựa trên mùi hương mạnh mẽ ngay cả khi cảm biến bị suy giảm, một khả năng khó đạt được bằng các thuật toán định vị mùi hương thông thường được triển khai trong các hệ thống robot hiện có.
Ý nghĩa đối với các hệ thống tự động trong tương lai
Nghiên cứu này thể hiện một bước tiến đáng kể trong lĩnh vực robot lấy cảm hứng từ sinh học, trong đó các nguyên tắc bắt nguồn từ hành vi sinh học được chuyển hóa thành các hệ thống kỹ thuật. Hơn nữa, nó cung cấp các hướng dẫn thiết kế quan trọng cho các nền tảng robot được trang bị khả năng tự hành khám phá lâu dài, đặc biệt là trong các kịch bản ứng dụng như ứng phó thảm họa và các môi trường thực tế đầy thách thức khác.
https://techxplore.com/news/2026-03-insect-robot-tracks-odors-antenna.html (ctngoc)