Điều khiển ổn định con lắc kép ngược bằng chiến lược trượt lùi tách rời
Bài báo tập trung vào hệ thống con lắc ngược kép trên xe trượt (DIPC), một mô hình kinh điển trong điều khiển phi tuyến, vốn có tính bất ổn cao và cấu trúc dưới điều khiển. Tác giả đề xuất phương pháp DB-SMC (Decoupled Backstepping Sliding Mode Control), kết hợp tính hệ thống của backstepping với độ bền vững của điều khiển trượt, nhằm tách động lực học phức tạp thành các phần đơn giản hơn, từ đó nâng cao hiệu quả ổn định và khả năng chống nhiễu.
Hệ thống con lắc ngược kép trên xe trượt (DIPC) là một trong những mô hình khó nhất trong lĩnh vực điều khiển phi tuyến, bởi nó vừa bất ổn, vừa dưới điều khiển, lại có sự tương tác mạnh giữa các thành phần. Mô hình này không chỉ có giá trị học thuật mà còn là mô hình rút gọn của nhiều ứng dụng thực tế như robot đi bộ, cần trục, điều khiển vệ tinh hay tay máy nhiều khớp.
Các phương pháp tuyến tính như PID hay LQR tuy dễ triển khai nhưng thường mất hiệu quả khi gặp phi tuyến, nhiễu hoặc biến thiên tham số. Điều khiển trượt (SMC) nổi bật nhờ tính bền vững, song lại gây hiện tượng chattering (dao động điều khiển) và thiếu khung thiết kế hệ thống cho các hệ nhiều trạng thái. Ngược lại, backstepping cung cấp quy trình thiết kế tuần tự dựa trên hàm Lyapunov, nhưng lại thiếu độ bền khi có nhiễu mạnh hoặc động lực học chưa mô hình hóa.
Để khắc phục, nhóm tác giả đề xuất DB-SMC - một chiến lược lai kết hợp ưu điểm của cả hai. Ý tưởng chính là tạo ra các bề mặt điều khiển ảo nhằm tách động lực học phức tạp thành các phần đơn giản hơn, từ đó thiết kế bộ điều khiển cho từng phần nhưng vẫn đảm bảo ổn định toàn hệ. Luật điều khiển được xây dựng dựa trên phân tích Lyapunov, đảm bảo tính hội tụ và ổn định tiệm cận.
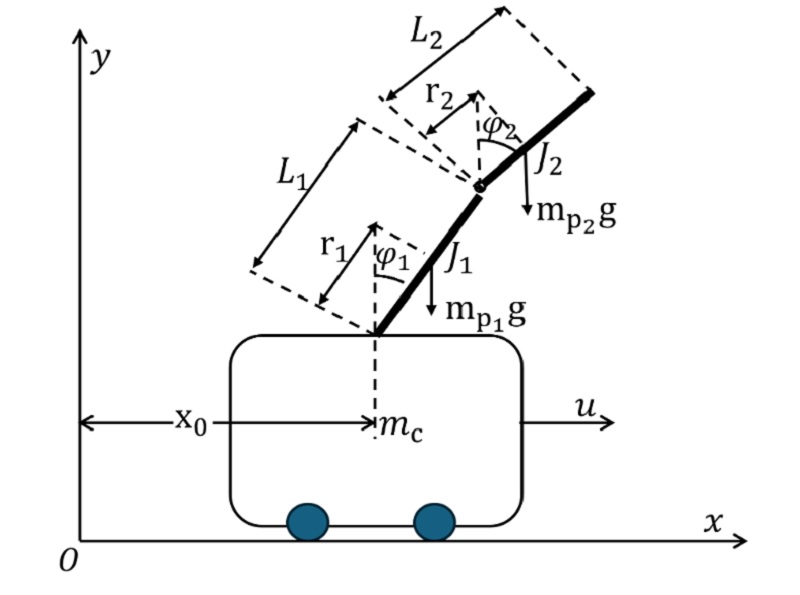
Trong phần mô hình toán học, hệ thống được xây dựng bằng phương pháp Lagrange, với các phương trình chuyển động biểu diễn dưới dạng ma trận. Hệ được đưa về dạng state-space để thuận tiện cho thiết kế điều khiển. Các sai số theo vị trí xe và góc con lắc được định nghĩa, sau đó xây dựng các bề mặt trượt S0,S1,S2. Tiếp theo, các bề mặt ảo Sd1, Sd2 được đưa vào để tách động lực học, giúp giảm sự phụ thuộc lẫn nhau giữa các con lắc. Luật điều khiển cuối cùng kết hợp thành phần tương đương (backstepping) và thành phần chuyển mạch (sliding mode), đảm bảo hàm Lyapunov âm xác định, tức hệ ổn định.
Trong phần mô phỏng, các tham số hệ thống (khối lượng xe 0.8 kg, con lắc 0.5 kg và 0.3 kg, chiều dài 0.3 m và 0.2 m, v.v.) được sử dụng. Kết quả cho thấy:
- Xe trượt nhanh chóng hội tụ về vị trí mong muốn, mặc dù có overshoot ban đầu.
- Góc và vận tốc của cả hai con lắc đều ổn định quanh vị trí cân bằng sau 2–4 giây.
- Tín hiệu điều khiển ban đầu có biên độ lớn (~25 N) nhưng nhanh chóng giảm và ổn định.
Phân tích độ bền vững cho thấy DB-SMC duy trì ổn định ngay cả khi thay đổi khối lượng, điều kiện ban đầu hoặc có nhiễu tác động lên cơ cấu chấp hành. Dù xuất hiện dao động nhỏ trong giai đoạn quá độ, hệ vẫn nhanh chóng ổn định.
Cuối cùng, nhóm tác giả so sánh DB-SMC với LQR bằng các chỉ số NMAE và NRMSE. Kết quả chứng minh DB-SMC vượt trội: giảm sai số trung bình tuyệt đối khoảng 40% và sai số bình phương trung bình khoảng 30% đối với vị trí xe, cũng như cải thiện đáng kể đối với góc hai con lắc.
Như vậy, DB-SMC không chỉ khắc phục hạn chế của các phương pháp truyền thống mà còn mang lại hiệu quả cao trong việc điều khiển hệ phi tuyến, dưới điều khiển và bất ổn như DIPC.
Nghiên cứu do nhóm tác giả Danh-Huy Nguyen, Van-Truong Nguyen, Trung-Hieu Lương (Khoa Kỹ thuật Điện và Điện tử, Đại học Khoa học và Công nghệ Hà Nội), Huyền-Truong Vu và Thi-Van-Anh Nguyen (Đại học Khoa học và Công nghệ Hà Nội) thực hiện.
Tạp chí Đo lường, Điều khiển và Tự động hóa 2025, 29(4): 1-8 (ctngoc)